什么是伺服体系
伺服体系(servomechanism)又称随动体系,是用来准确地跟从或复现某个进程的反响操控体系。
伺服体系使物体的方位、方位、状况等输出被控量可以跟从输入方针(或给定值)的恣意改动的主动操控体系。它的首要使命是按操控指令的要求、对功率进行扩大、改换与调控等处理,使驱动设备输出的力矩、速度和方位操控十分灵敏便利。

在很多情况下,伺服体系专指被操控量(体系的输出量)是机械位移或位移速度、加速度的反应操控体系,其效果是使输出的机械位移(或转角)准确地盯梢输入的位移(或转角),其结构组成和其他方式的反应操控体系没有原则上的差异。伺服体系开始用于国防军工, 如火炮的操控, 船舰、飞机的主动驾驶,导弹发射等,后来逐步推行到国民经济的许多部门,如主动机床、无线盯梢操控等。
伺服体系的结构组成
机电一体化的伺服操控体系的结构、类型繁多,但从主动操控理论的视点来剖析,伺服操控体系一般包含操控器、被控目标、履行环节、检测环节、比较环节等五部分。
1、比较环节
比较环节是将输入的指令信号与体系的反应信号进行比较,以获得输出与输入间的差错信号的环节,一般由专门的电路或计算机来完成。
2、操控器
操控器一般是计算机或PID操控电路,其首要使命是对比较元件输出的差错信号进行改换处理,以操控履行元件按要求动作。
3、履行环节
履行环节的效果是按操控信号的要求,将输入的各种方式的能量转化成机械能,驱动被控目标作业。机电一体化体系中的履行元件一般指各种电机或液压、气动伺服机构等。
4、被控目标
5、检测环节
检测环节是指可以对输出进行丈量并改换成比较环节所需求的量纲的设备,一般包含传感器和改换电路。
伺服体系的基本原理
方位检测设备将检测到的移动部件的实践位移量进行方位反应,与方位指令信号进行比较,将两者的差值进行方位调理,改换成速度操控信号,操控驱动设备驱动伺服电动机以给定的速度向着消除差错的方向运动,直到指令方位与反应的实践方位的差值等于零停止。
伺服体系的分类
1、开环伺服体系
开环伺服体系即无方位反应的体系,其驱动元件首要是功率步进电机或液压脉冲马达。这两种驱动元件的作业原理的本质是数字脉冲到视点位移的改换,它不必方位检测元件完成定位,而是靠驱动设备自身,转过的视点正比与指令脉冲的个数;运动速度由进给脉冲的频率决议。
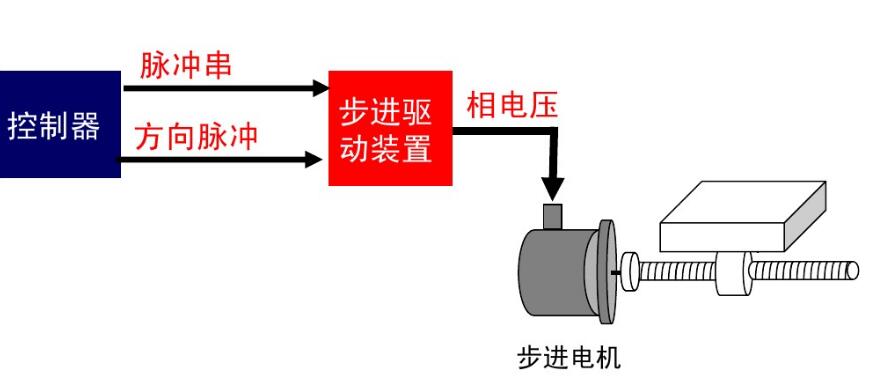
开环伺服体系的结构简单,易于操控,但精度差,低速不平稳,告诉扭矩小。一般用于轻载负载改动不大或经济型数控机床上。
2、闭环伺服体系
闭环伺服体系是差错操控随动随动体系。数控机床进给体系的差错,是CNC输出的方位指令和机床作业台(或刀架)实践方位的差值。闭环体系运动履行元件不能反映运动的方位,因而需求有方位检测设备。该设备测出实践位移量或许实践所在的方位,并将丈量值反应给CNC设备,与指令进行比较,求得差错,顺次构成闭环方位操控。
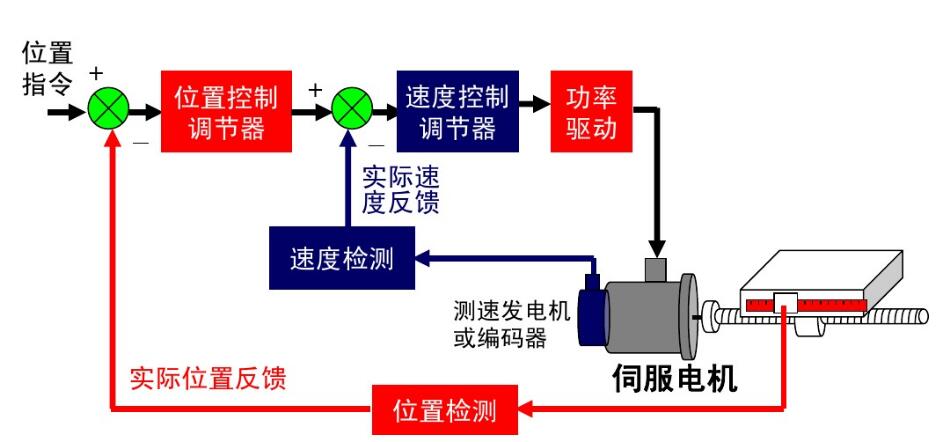
因为闭环伺服体系是反应操控,反应丈量设备精度很高,所以体系传动链的差错,环内各元件的差错以及运动中形成的差错都可以得到补偿,然后大大进步了跟从精度和定位精度。
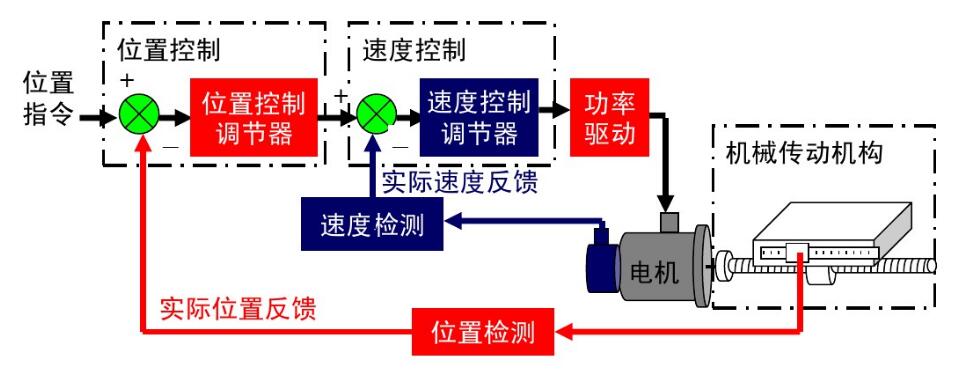
3、半闭环体系
方位检测元件不直接安装在进给坐标的终究运动部件上,而是中间经过机械传动部件的方位改换,称为间接丈量。亦即坐标运动的传动链有一部分在方位闭环以外,在环外的传动差错没有得到体系的补偿,因而这种伺服体系的精度低于闭环体系。
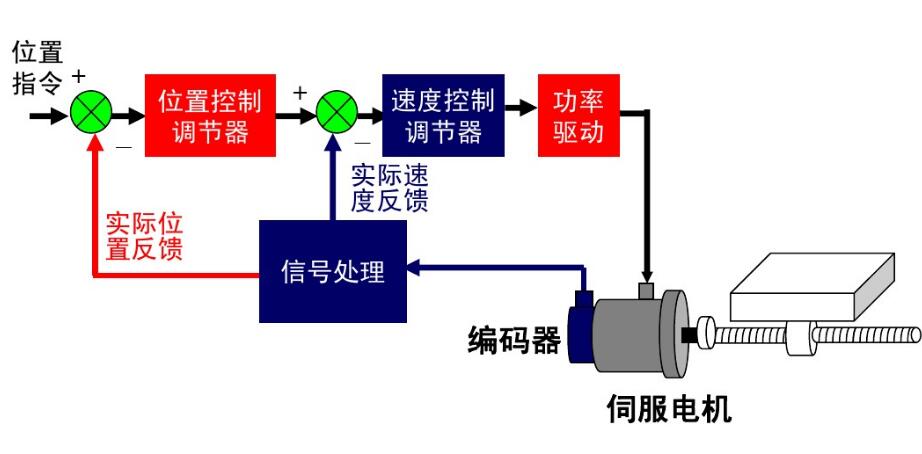
半闭环和闭环体系的操控结构是共同的,不同点仅仅闭环体系环内包含较多的机械传动部件,传动差错均可被补偿。理论上精度可以抵达很高。但因为受机械变形、温度改动、振荡以及其它要素的影响,体系安稳性难以调整。此外,机床运转一段时间后,因为机械传动部件的磨损、变形以及其它要素的改动,简单使体系安稳性改动,精度发生改动。因而,目前运用半闭环体系较多。只在具有传动部件紧密度高、功能安稳、运用进程温差改动不大的高精度数控机床上运用全闭环伺服体系。
伺服体系的功能要求及参数
功能要求
对伺服体系的基本要求有安稳性、精度和快速呼应性。
安稳性好:效果在体系上的扰动消失后,体系可以康复到原来的安稳状况下运转或许在输入指令信号效果下,体系可以抵达新的安稳运转状况的才能,在给定输入或外界搅扰效果下,能在时间短的调理进程后抵达新的或许回复到原有平衡状况;
精度高:伺服体系的精度是指输出量能跟从输入量的准确程度。作为精细加工的数控机床,要求的定位精度或概括加工精度一般都比较高,允许的差错一般都在 0.01~0.00lmm之间;
快速呼应性好:有两方面意义,一是指动态呼应进程中,输出量随输入指令信号改动的敏捷程度,二是指动态呼应进程完毕的敏捷程度。快速呼应性是伺服体系动态品质的标志之一,即要求盯梢指令信号的呼应要快,一方面要求过渡进程时间短,一般在200ms以内,乃至小于几十毫秒;另一方面,为满意超调要求,要求过渡进程的前沿陡,即上升率要大。
节能高:因为伺服体系的快速相应,注塑机可以依据自身的需求对供应进行快速的调整,可以有用进步注塑机的电能的利用率,然后抵达高效节能。
首要参数
衡量伺服体系功能的首要指标有频带宽度和精度。频带宽度简称带宽,由体系频率呼应特性来规则,反映伺服体系的盯梢的快速性。带宽越大,快速性越好。伺服体系的带宽首要受操控目标和履行机构的惯性的约束。惯性越大,带宽越窄。一般伺服体系的带宽小于15赫,大型设备伺服体系的带宽则在1~2赫以下。自20世纪70年代以来,因为发展了力矩电机及高灵敏度测速机,使伺服体系完成了直接驱动,清除或减小了齿隙和弹性变形等非线性要素,使带宽抵达50赫,并成功使用在远程导弹、人造卫星、精细指挥仪等场所。伺服体系的精度首要决议于所用的丈量元件的精度。
因而,在伺服体系中有必要选用高精度的丈量元件,如精细电位器、自整角机、旋转变压器、光电编码器、光栅、磁栅和球栅等。此外,也可采纳附加办法来进步体系的精度,例如将丈量元件(如自整角机)的丈量轴经过减速器与转轴相连,使转轴的转角得到扩大,来进步相对丈量精度。选用这种计划的伺服体系称为精测粗测体系或双通道体系。经过减速器与转轴啮合的测角线路称精读数通道,直接取自转轴的测角线路称粗读数通道。

伺服体系的使用
1、激光加工范畴
2、机器人范畴
3、数控车床范畴
4、大规模集成电路制作办公主动化设备
5、雷达等高科技范畴
杭州之山智控技术有限公司
地址:杭州市闲林工业园闲兴路9号
网站:www.zscnc.cn
营销服务热线:4008-096-368
技术支持热线:189-5718-8133


 浙公网安备 33011002011190号 浙ICP备13029913号
浙公网安备 33011002011190号 浙ICP备13029913号 
